Apr 2026
A C++17 desktop application processing plots and driving my Axidraw A3
Source : https://github.com/nshelton/Minotaur
(theoretically cross platform, but haven’t built on Windows for a bit of time). MacOS is supported.
Overview
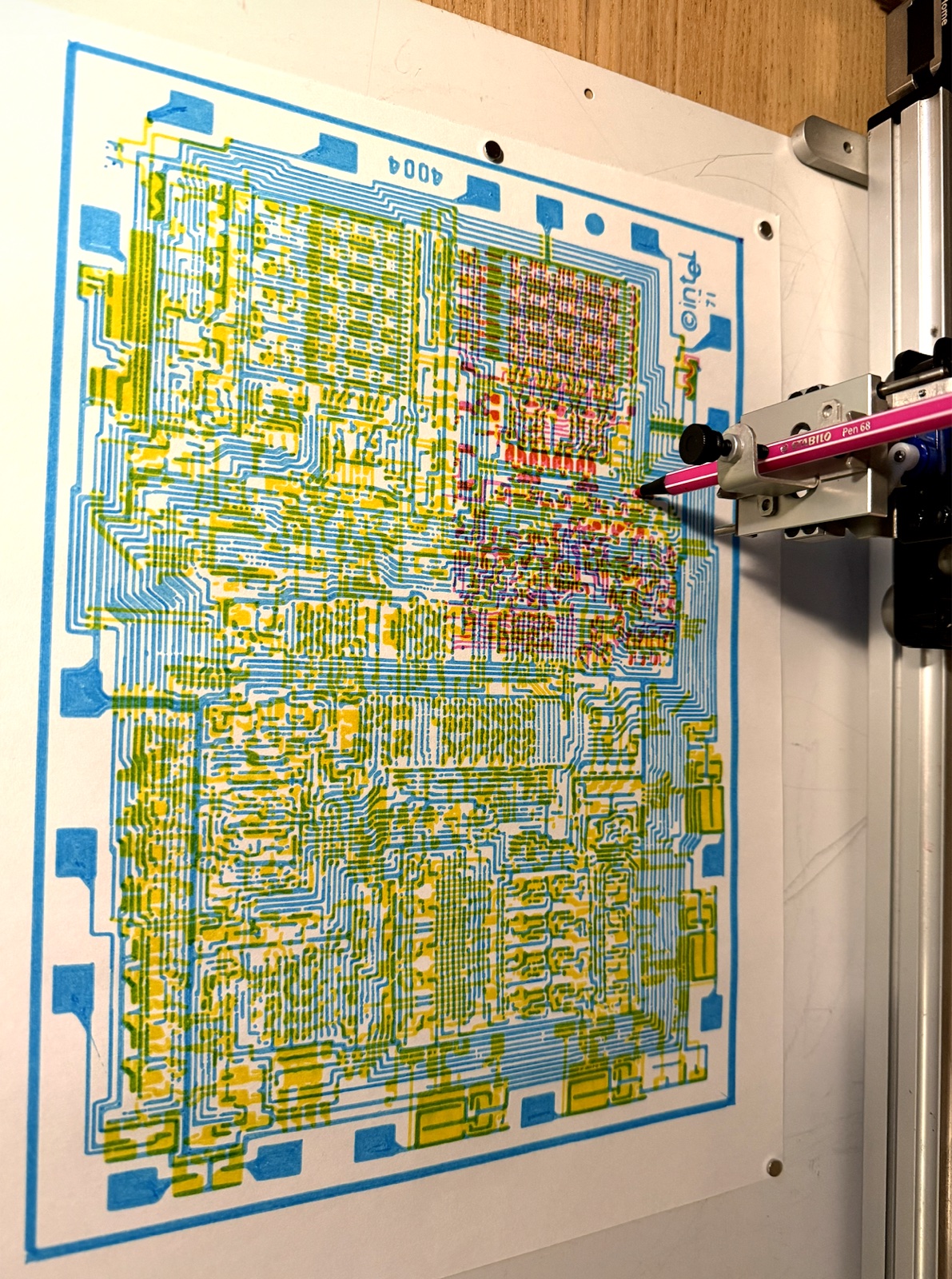
Minotaur is a tool I built from scratch for my pen plotting practice.
I have been plotting on the Axidraw A3 for about 5 years, now, and I love the hardware but was really frustrated at their Inkscape driver. Inkscape is great, and I usually love FOSS like GIMP. However, for the plots I was trying to do, Inkscape gets slow with tons of nodes, and the whole app just freezes and doesn’t provide any feedback while plotting. I wanted:
- Pause / resume
- No GUI freezing
- Change speed, accel, pen up/pen down in realtime
- see realtime progress
- millions of nodes with no lag
- faster path optimisation
Other stuff inkscape doesn’t do, that would be cool:
- first-class image handling
- basic image processing and cleanup
- faster image to vector tracing, more options
I don’t need full inkscape featureset either, and I know I can definitely render millions of nodes at 60fps. Especially if I don’t need to manually edit each one. I started with a web interface using Web Serial API but eventually ran into a performance wall when using javascript, and didn’t feel like doing some complicated rust/c++ -> webassembly thing. So I decided to go full C++ / OpenGL / imGui.

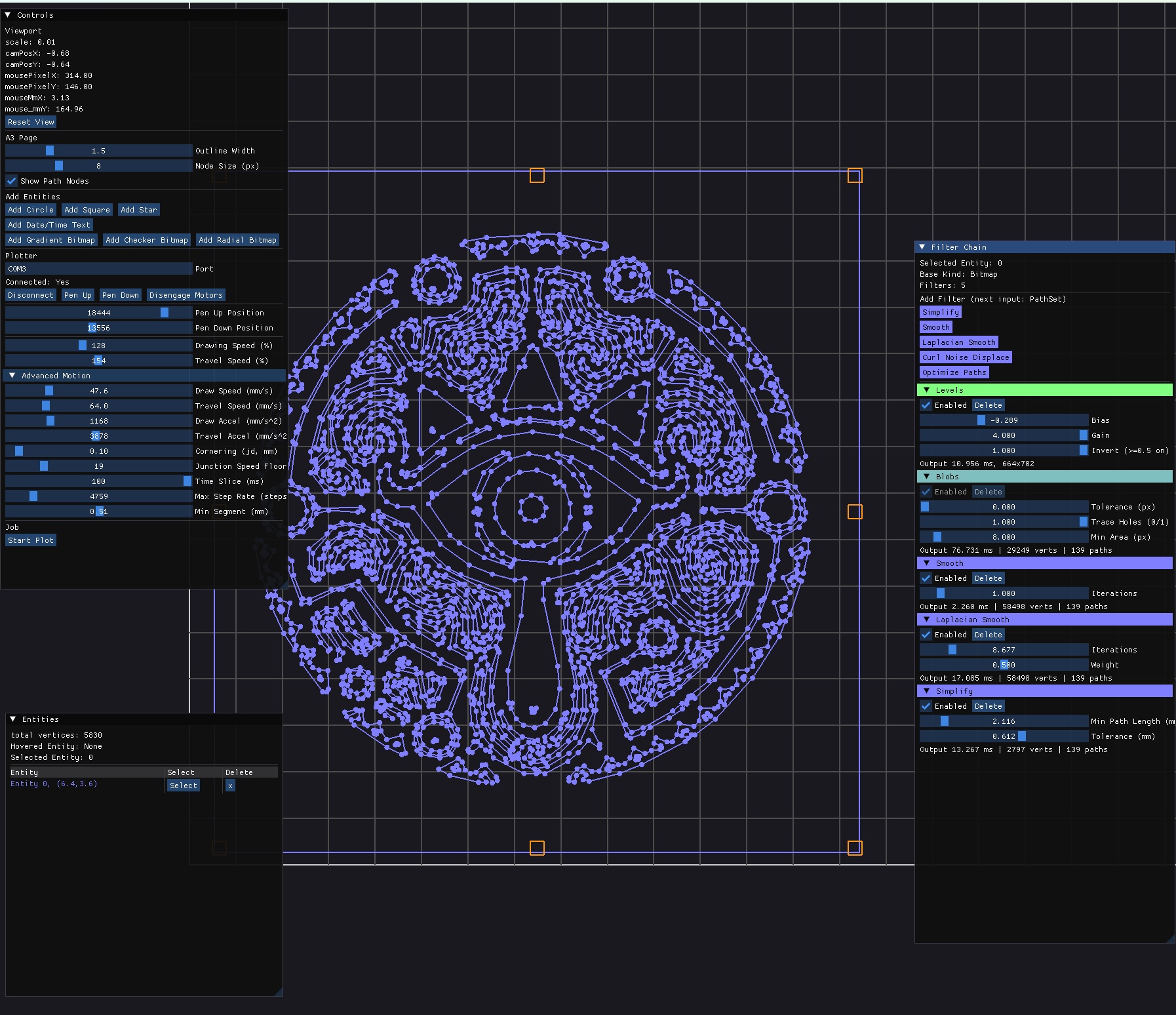
So I designed this around a “filter chain” - where the plot itself starts out as an image, and has these modular building blocks that can take different types of data and transform/filter it into something that’s plottable.
The core idea is a nondestructive, node-style processing pipeline, I had a bunch of python scripts to modify paths and generate jsons at one point, but it’s much easier to work on it all live! I love realtime!
Architecture
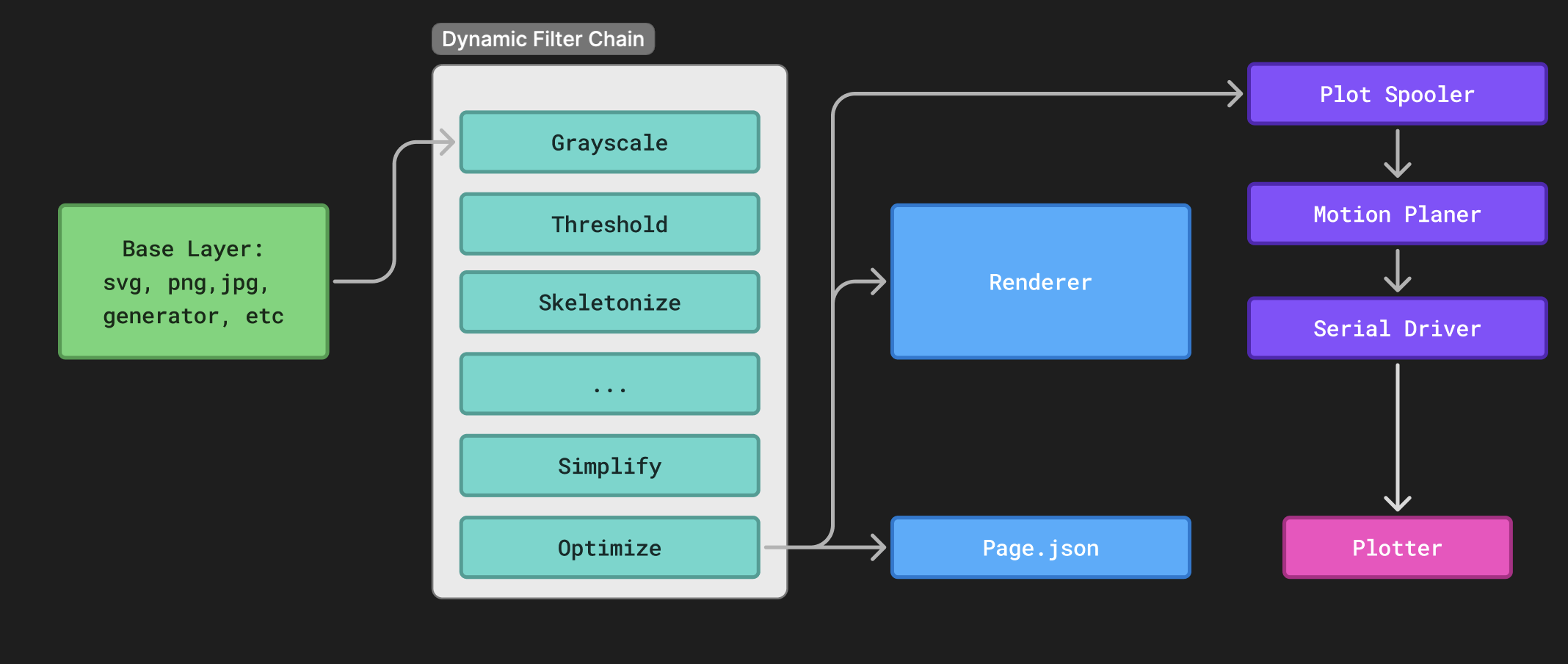
Example data flow:
The PageModel has “entities” with a transform and a pathset, or image. The Filter chain is a list of Filters, which output one of these types, and dynamic parameters which can control how it filters the data.
Data Types
- Bitmap — 8-bit grayscale row-major. General image format.
- FloatImage — 32-bit float, rendered with a colormap. I currently just use this for distance field experiments.
- ColorImage — RGB 8-bit interleaved, used for color picking, general “input” format
- PathSet — Vector polylines in mm coordinates. A list of list of Vec2.
Filters are type-checked at chain construction time. A filter that takes a Bitmap and outputs a PathSet can’t be placed after a filter that outputs a FloatImage. The system validates this when you add or reorder filters in the UI.
Generators
Instead of importing an image, you can generate content procedurally. I will definitely add more, eventually maybe even a javascript interpreter or something to do some fully generative plots. But right now this is mainly a plotter program, not really where you’re going to do a ton of “generative” type stuff.
- SVG Import — Parses SVG files via nanosvg, flattening cubic Béziers with adaptive chord-error tolerance.
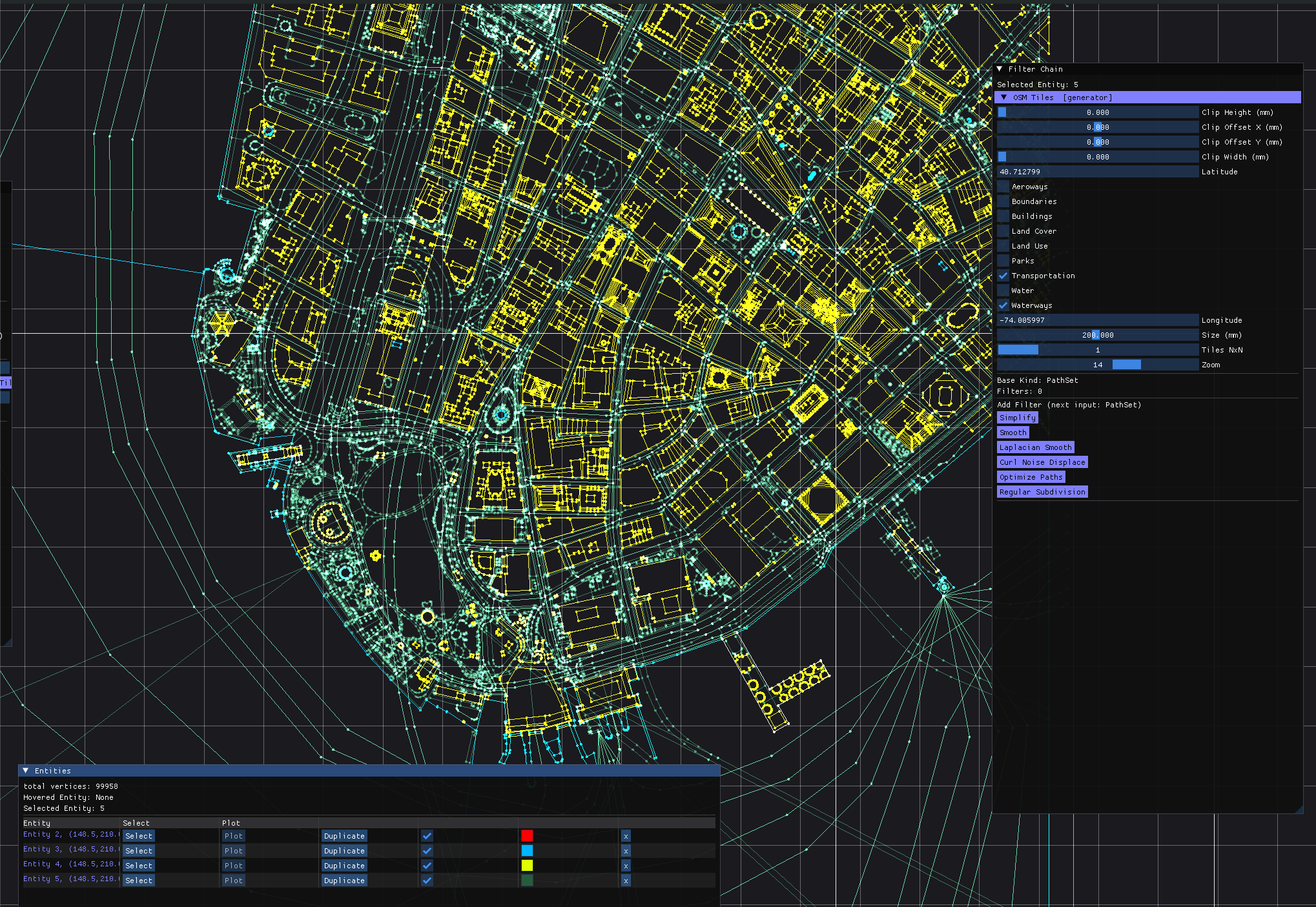
- OpenStreetMap — Fetches Mapbox Vector Tiles for any lat/lon region, decodes the the protobuf format, does Mercator projection math, and produces plottable PathSets of streets, buildings, water, parks, and boundaries. The ui is a little clunky but it gets the job done.
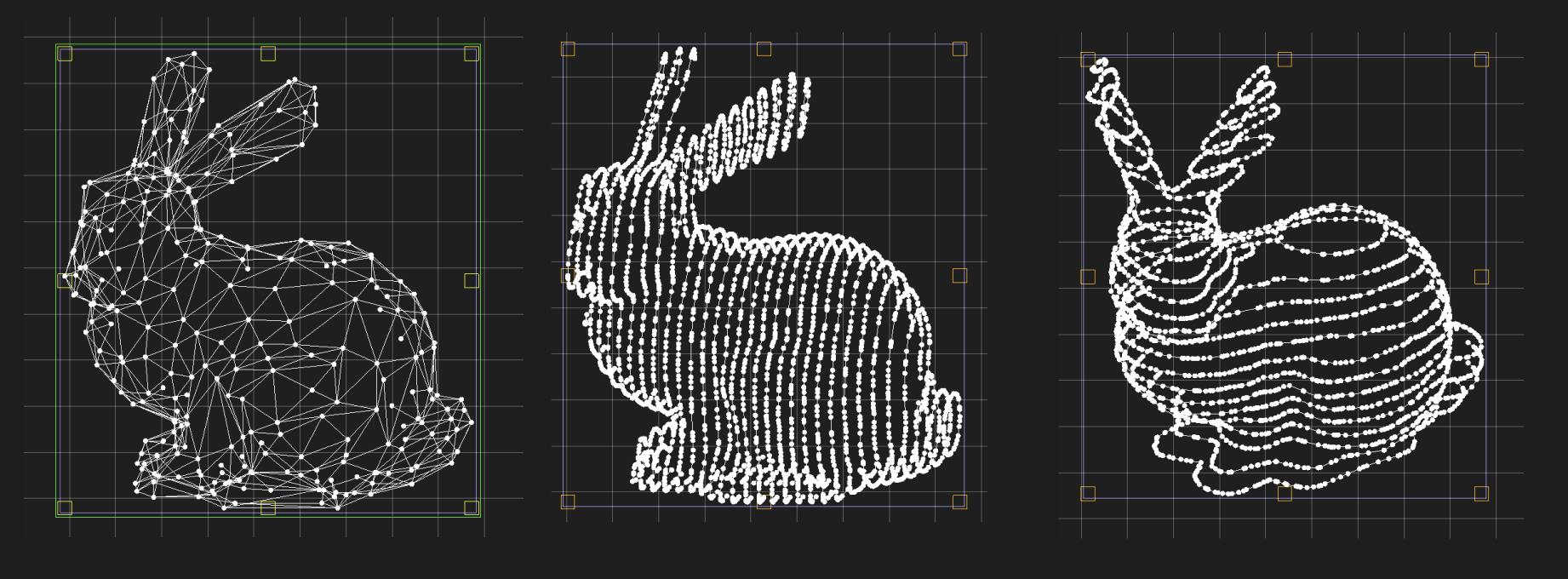
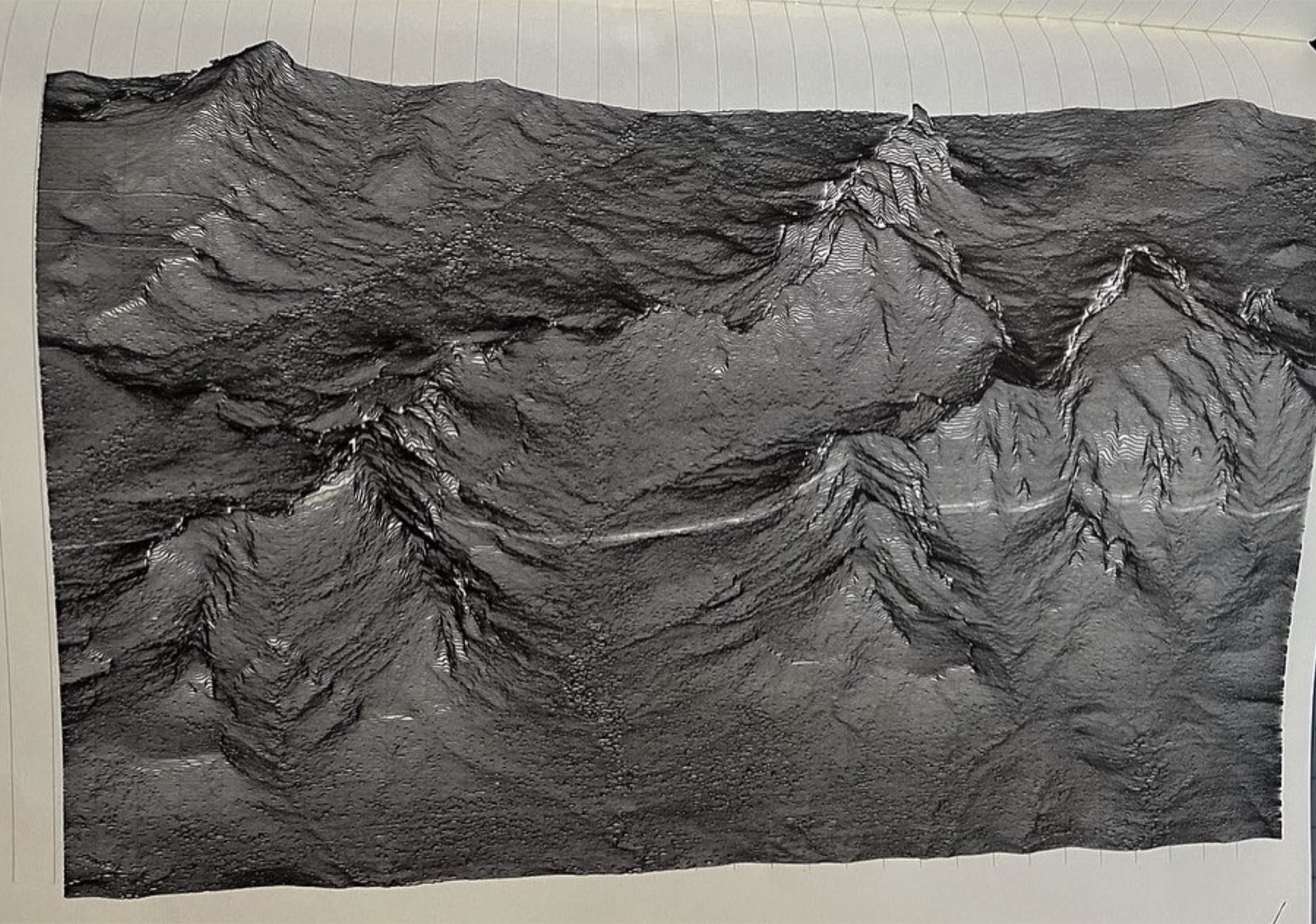
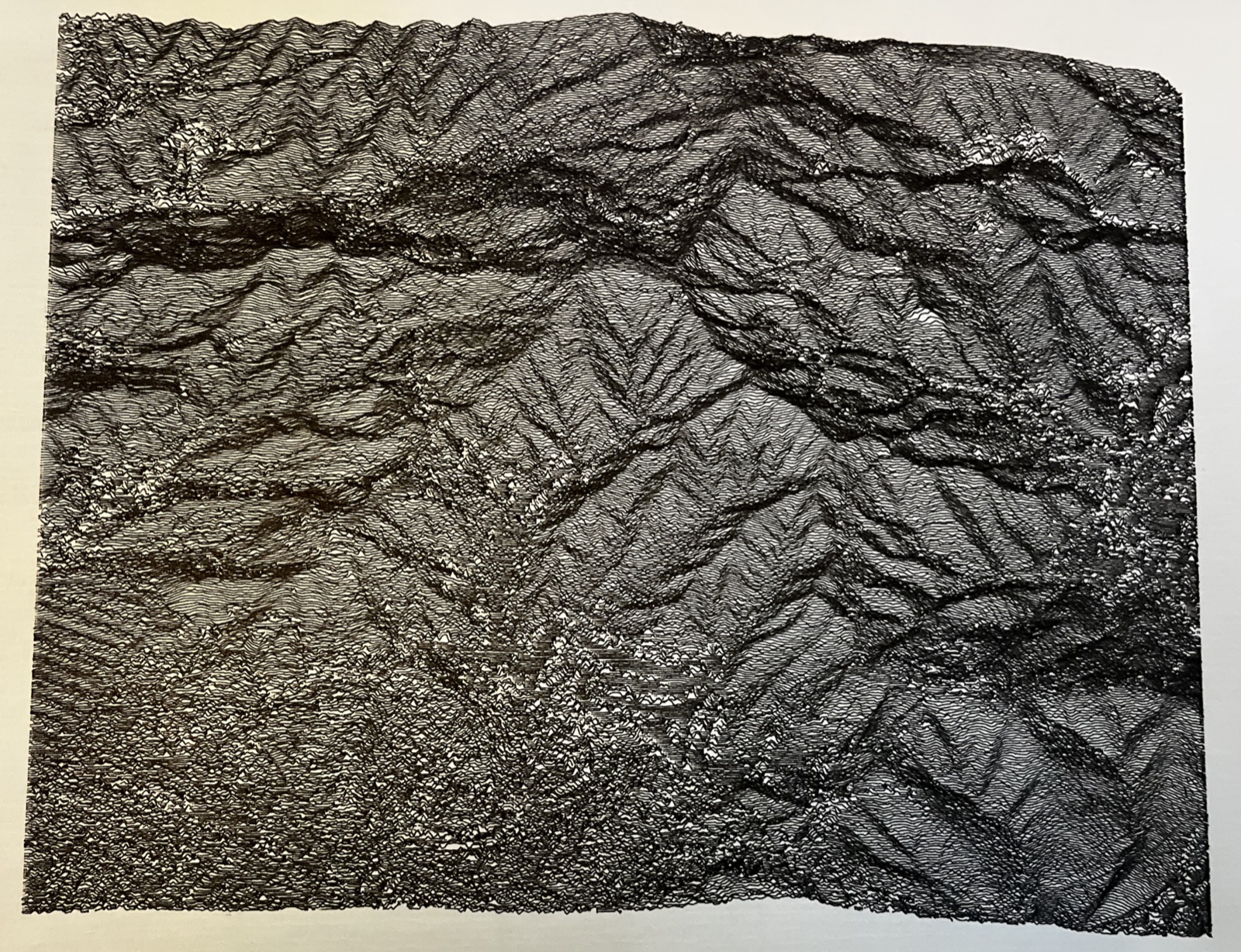
- 3D Mesh Projection — Loads OBJ files and projects them to 2D with hidden-line removal. The hidden-line algorithm uses scanline rasterization with a depth buffer (GPU-accelerated via OpenGL). It also supports isoline slicing along any axis for a contour-map effect.
- Text — basic hershey vector font
- Primitives — Circles, stars, grids for testing and geometric compositions.
- Image - Can’t be plotted, you need to convert to a PathSet
Bitmap -> Bitmap Filters
Sometimes you want to clean up the bitmap before you run a trace.
- Color Picker - convert RGB to binary grayscale, by threshold to a specific color. useful when you have different pen passes for different areas. Grayscale just turns RGB->gray.
- Threshold, Levels, CLAHE (adaptive histogram equalization), Blur, Rotate. These have some fancy SIMD vector instructions when appropriate.
- Edge Detection — Canny with configurable thresholds and Gaussian prefiltering.
- Erode, Dilate, and Skeletonize. The skeletonizer extracts the medial axis of black regions down to single-pixel-wide skeletons, which produce clean single-stroke paths. I totally just stole the algorithm from scikit-image https://scikit-image.org/docs/0.25.x/auto_examples/edges/plot_skeleton.html
Bitmap -> PathSet Filters
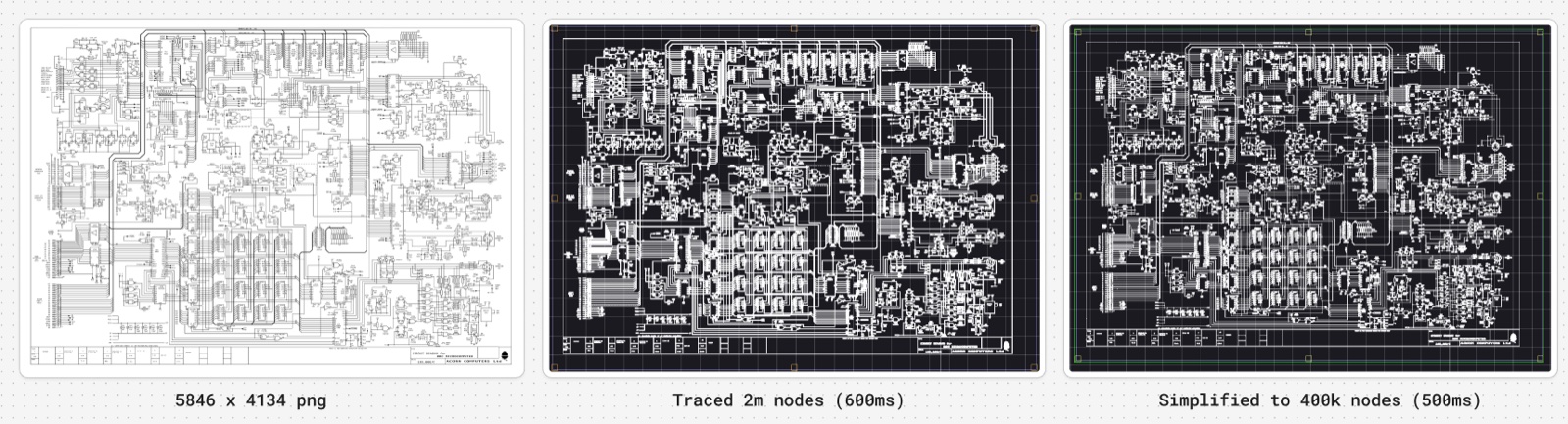
This is where the interesting stuff happens. Theres a lot of different ways to try to get an image to a path, and none of them are good in general, depends on the content.

Binary operators
These run on a black/white binary image. If the input is grayscale, it will just do a threshold.
- Blobs - this is a simple BFS flood-fill. I spent some time optimizing this, but it’s still kind of slow for large images. Just draws an outline for connected components, with optional hole-filling.
- Trace this is just a greedy black-pixel-connector. It works well if you have run a skeletonize filter before, or have very thin lines in your image.
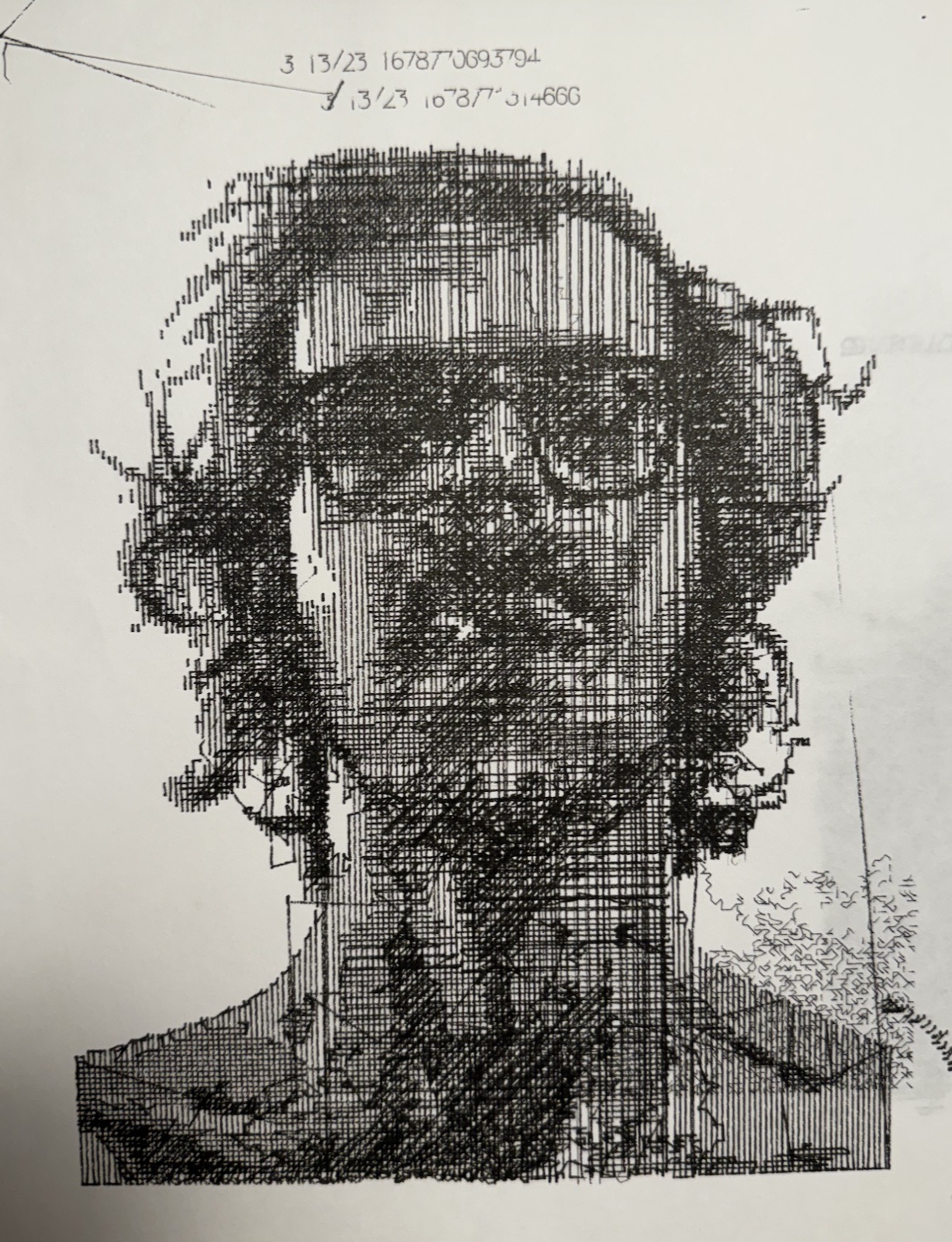
- Line Hatch: just Parallel hatching at configurable angles. Simple but effective for shading. I also like to layer multiple plots with varying thresholds to get a full “crosshatching” effect.
- Flow Field Hatch: Hatching that follows the image gradient direction (computed via Sobel filters or distance field tangents). Lines curve to follow the contours of the image rather than running in straight parallels. This doesn’t totally work right, still in development.
- Concentric Outlines: Generates contours at fixed intervals. This uses the distance field technique, but also is kind of in development. I wanted some more coherent “trace” type paths, but for fatter line images (multiple pixels wide).
Grayscale operators
- Voronoi Stippling: Lloyd relaxation on 100k+ seed points to produce density-weighted dot distributions. This gives a hand-stippled look where darker regions have tighter dot clusters.
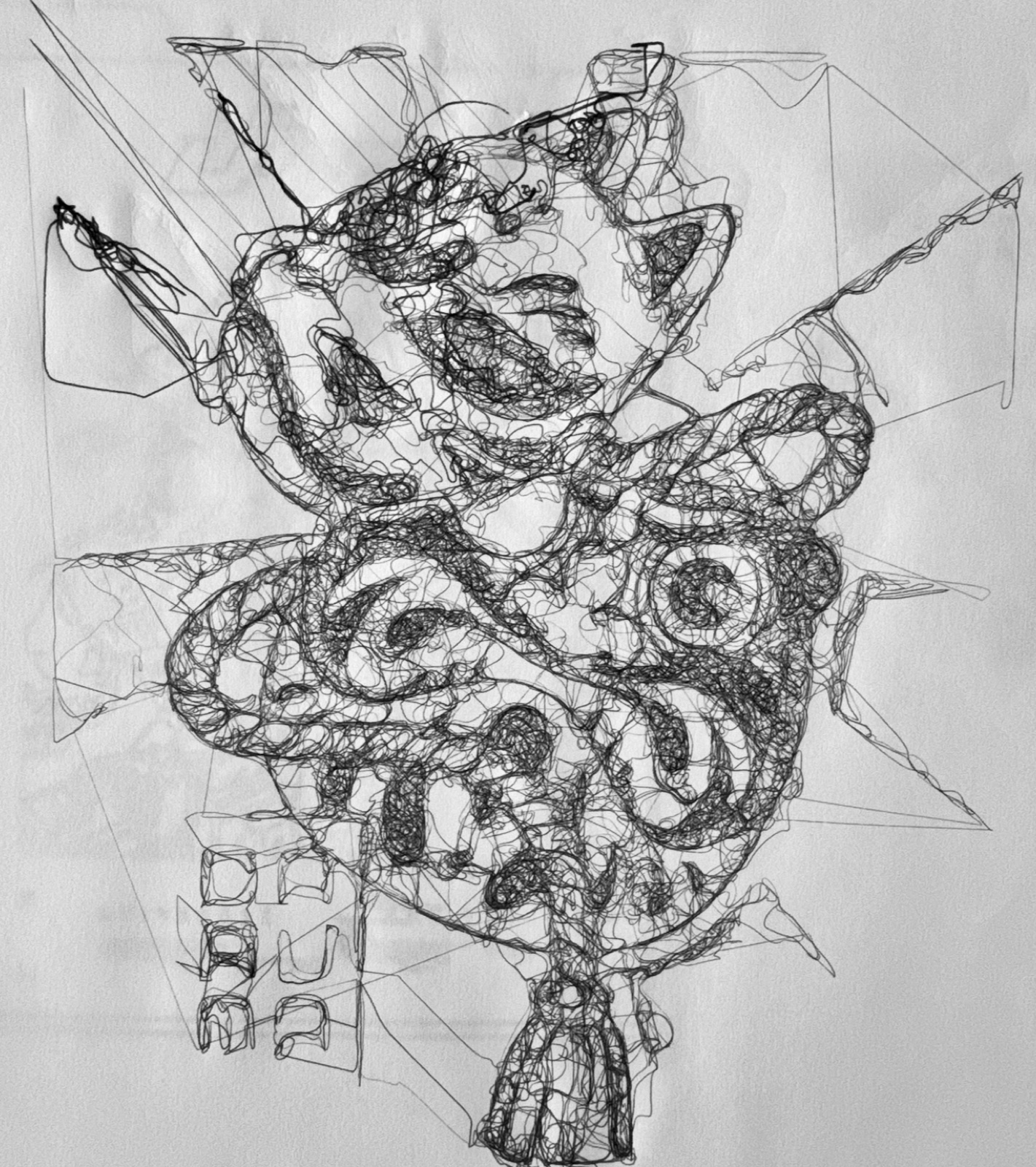
- Flow Snake: This is kind of like the physarum algorithm. There is an “agent” which crawls around on the page and “eats” the ink, which increases the value of the pixel and surrounding area using a gaussian. Then, it moves to the darkest area in the range of its sensors (angle and distance is configurable), and repeats. Still haven’t dialed this one in but I have made some cool proof of concepts.
PathSet -> PathSet Filters
Once you have vector paths, these filters clean them up for plotting. Maybe one day this will be automatic, but it’s nice to be able to tune all the knobs to get it to have the amount of detail / smoothness you want.
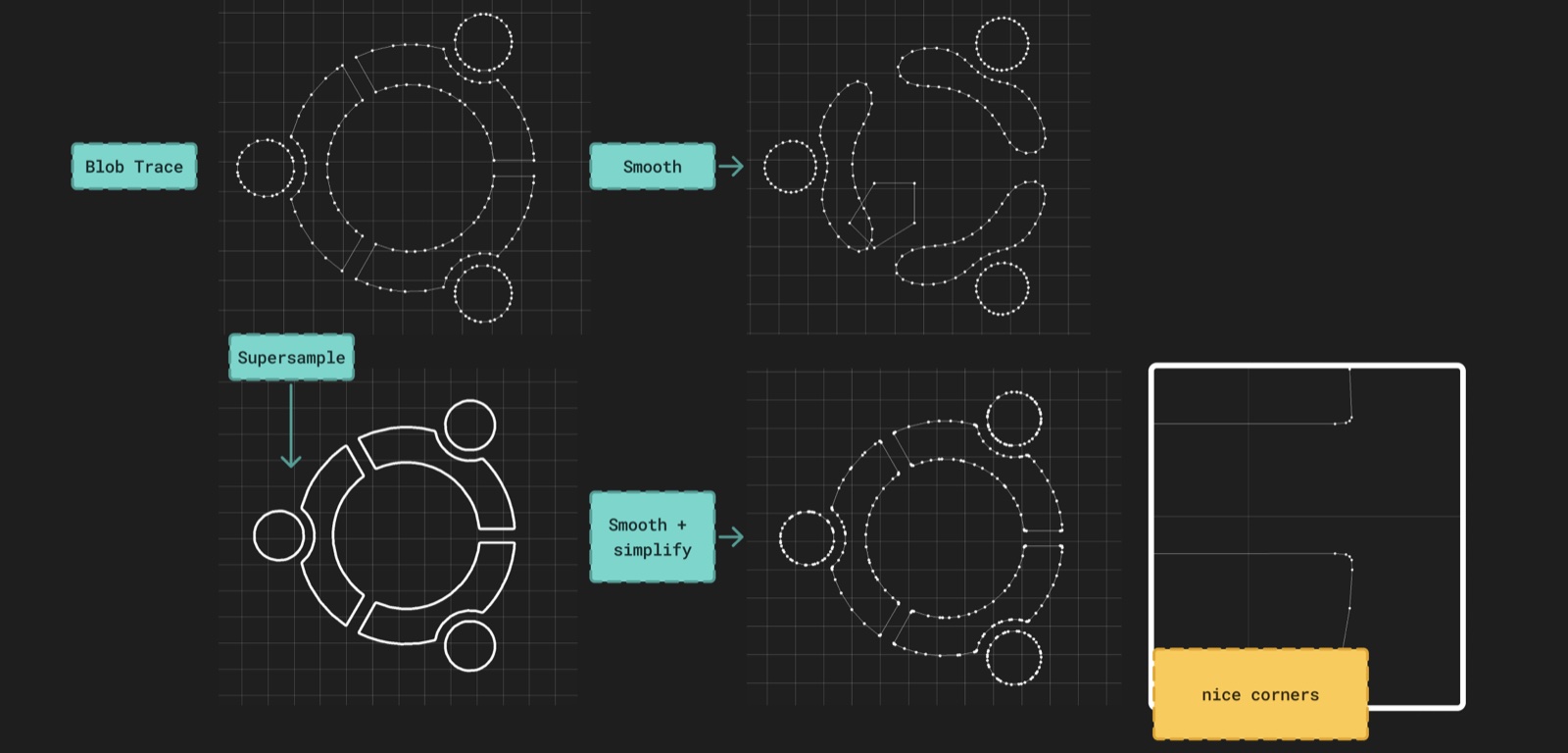
- Simplify — Ramer-Douglas-Peucker polyline simplification with minimum segment length culling.
- Laplacian Smooth - moves vertex to a weighted average of neighbors. There’s controls for Iterations and amount.
- Subdivide — Ensures a maximum distance between consecutive points. This is good to run before a laplacian smoothing so it doesn’t move the ends and destroy sharp edges.
- Smooth — Chaikin subdivision makes a ton more points, so I don’t really use it much.
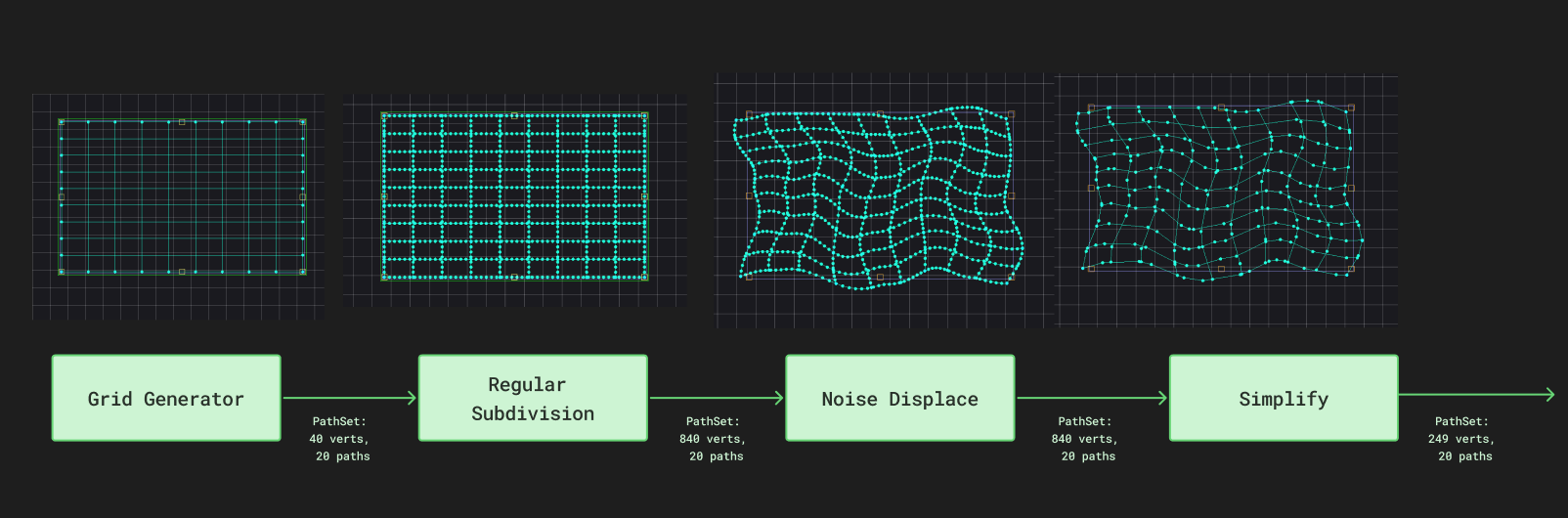
- Curl Noise — Perlin noise displacement with octave-based control. Adds organic wobble to paths. I thought this would be more useful than it was, but can make things look a little more natural. I thought eventually this could be more of a “generative” flow where you can make all kinds of cool plots with different filters on generators, but haven’t fully implemented any of those flows yet.
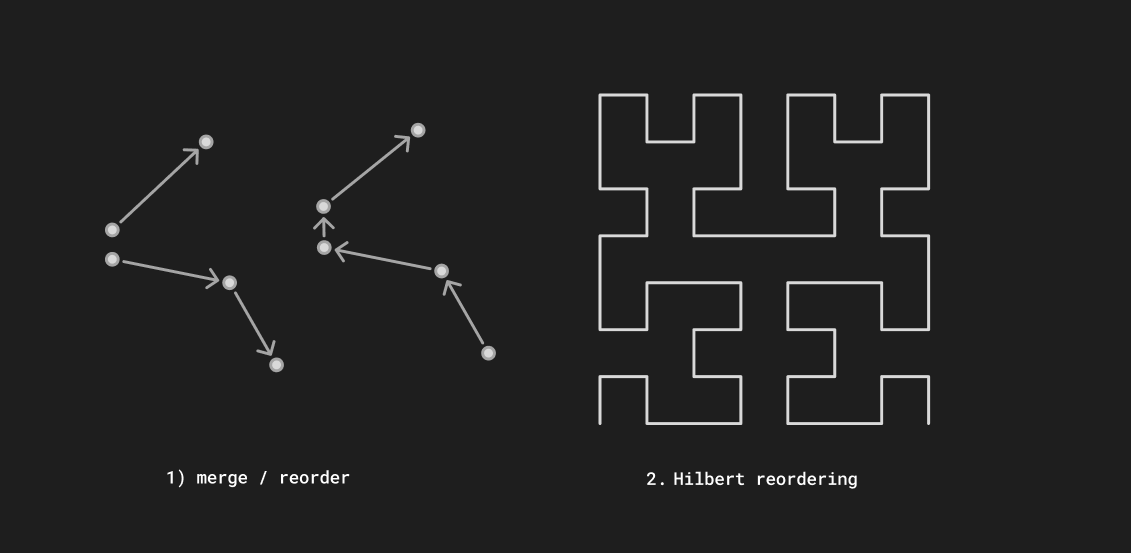
- Optimize — Path reordering and merging to minimize total pen-up travel distance. This is kind of traveling salesman problem, but I just use a KDTree and do the greedy solution. An unoptimized plot can easily have more pen-up traveling than pen down plotting time!
- Nearest-neighbor greedy search (fast, good enough, use kD tree)
- Hilbert curve ordering which maps 2D path positions to a 1D space-filling curve index. This makes it easier to see the plot progress. I ensure that each cell of a hilbert curve is finished before we start plotting things in another cell.
Performance
I have tried to pay close attention to making the whole thing efficient and performant from the beginning so we can easily handle millions of nodes and 4k images.
Filter Chain Caching
Each filter’s output is cached with a generation counter. When you change a parameter, only that filter and everything downstream gets recomputed. The evaluation runs on a background thread so the UI stays responsive even during expensive operations like Voronoi stippling or mesh projection. The output accessor is non-blocking during editing and blocking when you actually spool a plot.
Motion Planning
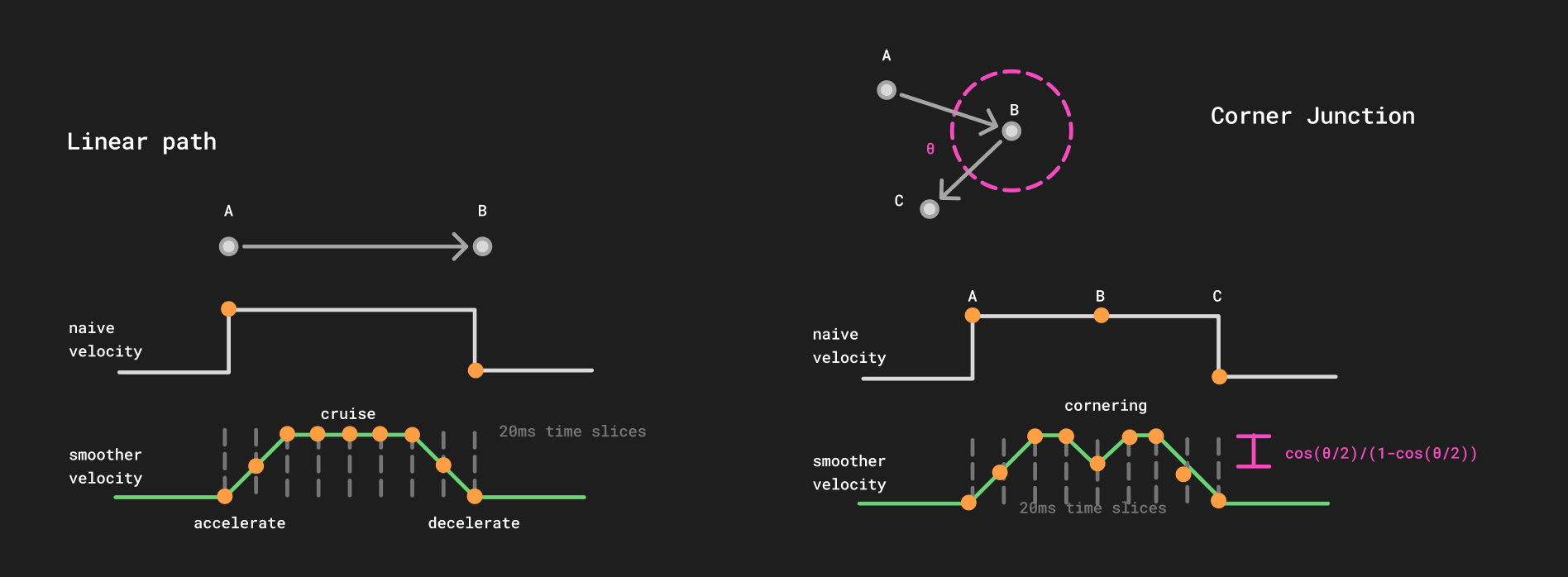
The solution is a forward-backward velocity pass. This was based on the Sunny Jeon’s cornering algorithm (2011) and the motion planner from the Windell Oskay’s axidraw plugin
Basically, you want to slow down on corners, and accelerate smoothly when starting and stopping! Simple enough, but makes a huge difference in plot quality.
Serial Streaming
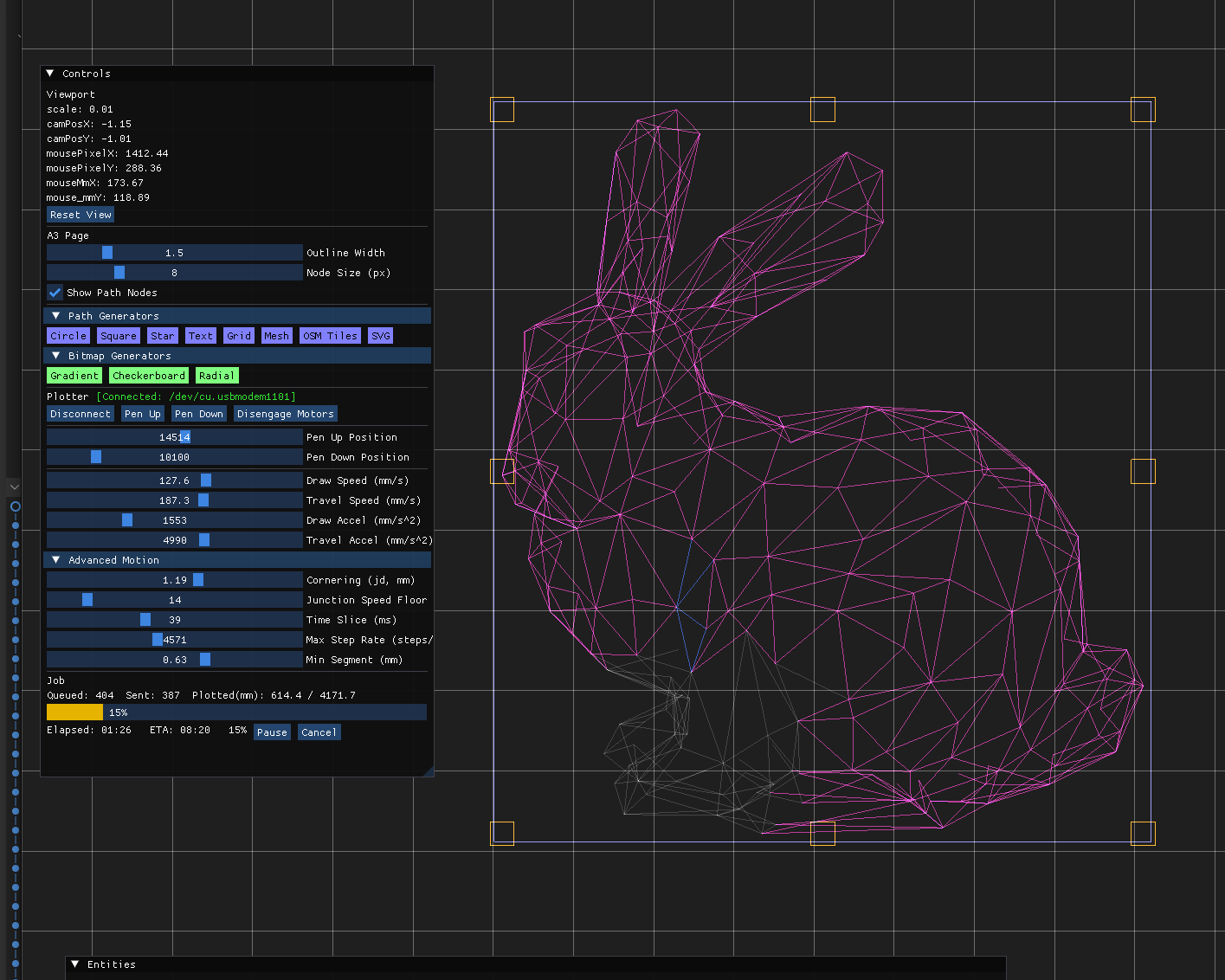
The AxiDraw’s EBB controller has a small command buffer, so the host has to stream commands in real time without gaps (which cause visible pen hesitation) or overflow (which drops commands). The PlotSpooler runs a background thread that has 1s of commands queued up. That way, the frontend can still be responsive, you can see the live plot progress overlaid on the plot.
Conclusion / What’s Next
I currently do all my plots through here, so this has come a long way since i started developing the javascript version about a year ago. But there’s some room form improvement.
- Random crashes
- GUI polish
- Windows / Linux build
I’m resisting the urge to integrate a full javascript or simple interpreter, maybe p5 or sometihng to generate the plots, but that would be sick eventually. Thanks for reading this far!