Jun 2025
Real-time surgical projection mapping and 3D fiducial tracking for image-guided surgery.

Overview
From 2024 to 2026 I was Senior Software Engineer at Illuminant Surgical, building real-time projection mapping systems for surgical navigation. Key personnel on NSF and NIH SBIR grants. I worked on the instrument calibration, fiducial registration, system architecture and visualization.

SIGGRAPH 2025
Our work was presented at SIGGRAPH 2025:
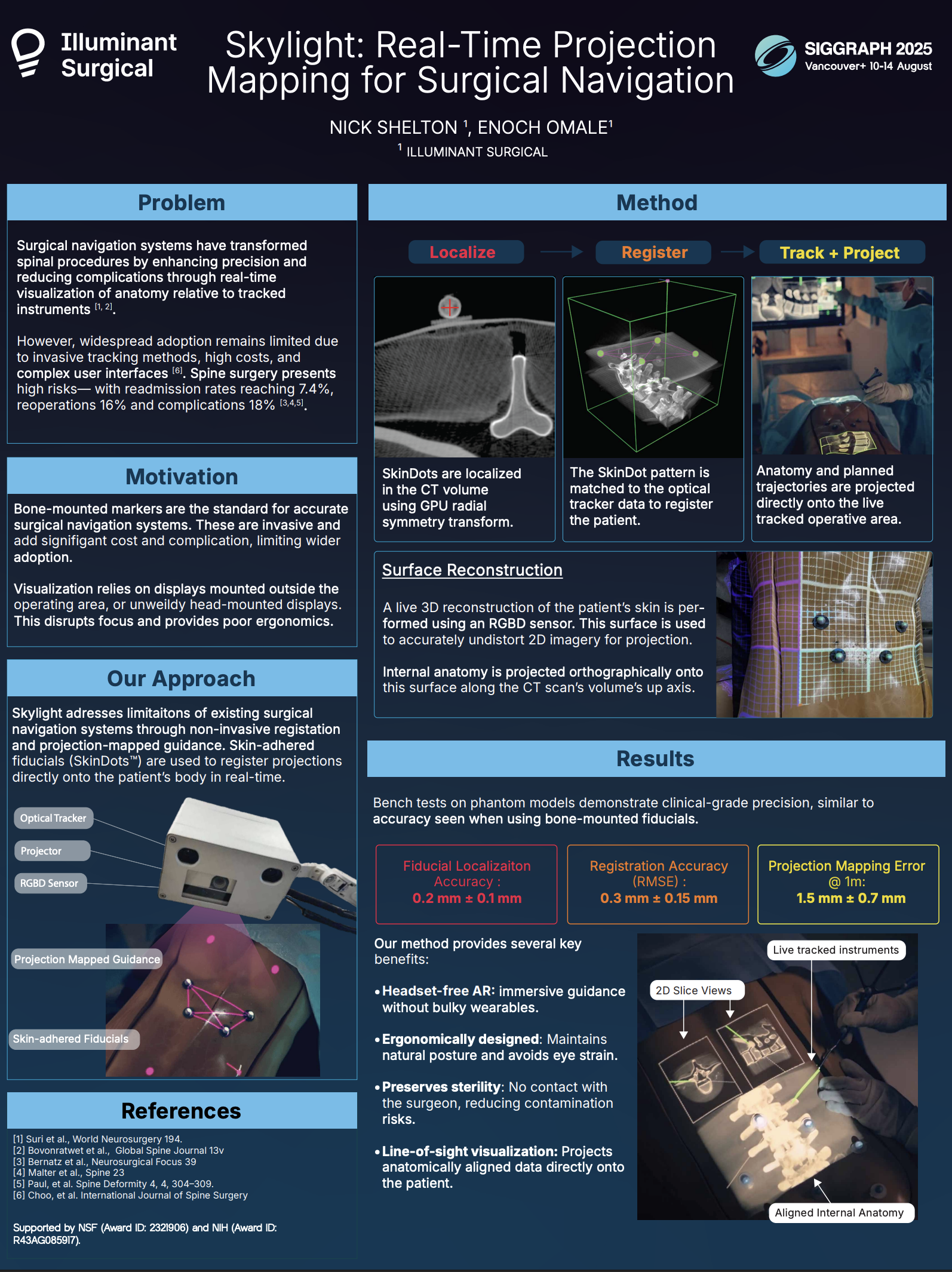
Poster — Skylight: Real-Time Projection Mapping for Surgical Navigation Leveraging Skin-Adhered Fiducials. ACM Digital Library
Workshop — XR in Medicine. ACM Digital Library
Details
I learned a lot about spinal fusion procedures, and implemented a novel fiducial localization algorithm to find the skindots inside of CT scans.
Also implemented a end-to-end calibration pipeline to jointly register the camera, depth image, infrared stereo 3D tracker and projector. The alignment was sub-mm for the 3D tracker and on the order of a few mm for the projections.
Grants Awarded
I got to be involved in writing some of these grants, providing updates and data analysis.
Provisional Patent
System and Method for Real-Time Projection of 3D Medical Image Information onto a Patient’s Body via Tracking of Skin Fiducials (2025).
Tools
Unity, C#, HLSL DirectX Compute, Python, OpenCV, SciPy, DICOM